В течение многих лет роботы применялись исключительно на узкоспециализированных участках, выполняя повторяющиеся задачи в стандартизированных условиях заводов. Сегодня искусственный интеллект коренным образом меняет отрасль — современные роботы способны распознавать и выполнять пользовательские команды, а также приспосабливаться к динамично меняющемуся окружению.
Мировая индустрия вступает в фазу стремительного роста: по прогнозу Citi, к 2035 году во всем мире будет развернуто 1,3 млрд роботов, и они выйдут далеко за пределы промышленных предприятий, появившись в домах и сервисных секторах. Morgan Stanley ожидает, что рынок гуманоидных роботов превысит 5 трлн долларов к 2050 году.
Масштабный рост открывает значительные рыночные возможности, однако сопровождается существенными вызовами: централизацией, проблемами доверия, конфиденциальности и масштабируемости. Технологии Web3 дают принципиально новые инструменты — они позволяют создавать децентрализованные, верифицируемые, сохранеющие приватность и кооперативные сети роботов, непосредственно решающие эти вопросы.
В этом выпуске мы разберем структуру современной цепочки создания ценности в AI-робототехнике, уделяя особое внимание гуманоидным роботам, и проанализируем перспективные возможности, возникающие на стыке AI-робототехники и Web3.
Цепочка создания ценности AI-робототехники
Цепочка включает четыре основные составляющие: аппаратное обеспечение, интеллект, данные и агент. Каждый слой дополняет другой, позволяя роботам распознавать, рассуждать и действовать в сложных, реальных условиях.
В последние годы достигнут заметный прогресс в аппаратном слое, чему способствовали лидеры отрасли — Unitree и Figure AI. Однако ключевые проблемы сохраняются вне аппаратной части: нехватка высококачественных датасетов, отсутствие универсальных фундаментальных моделей, слабая совместимость между платформами и потребность в надежных edge-решениях. Поэтому самые перспективные возможности открываются в слоях интеллекта, данных и агентных решений.
Аппаратный слой: «Тело»
Сегодня проектировать и внедрять современные «тела роботов» стало проще, чем когда-либо. На рынке уже более 100 типов гуманоидных роботов: среди них — Optimus от Tesla, G1 от Unitree, Digit от Agility Robotics и Figure 02 от Figure AI.
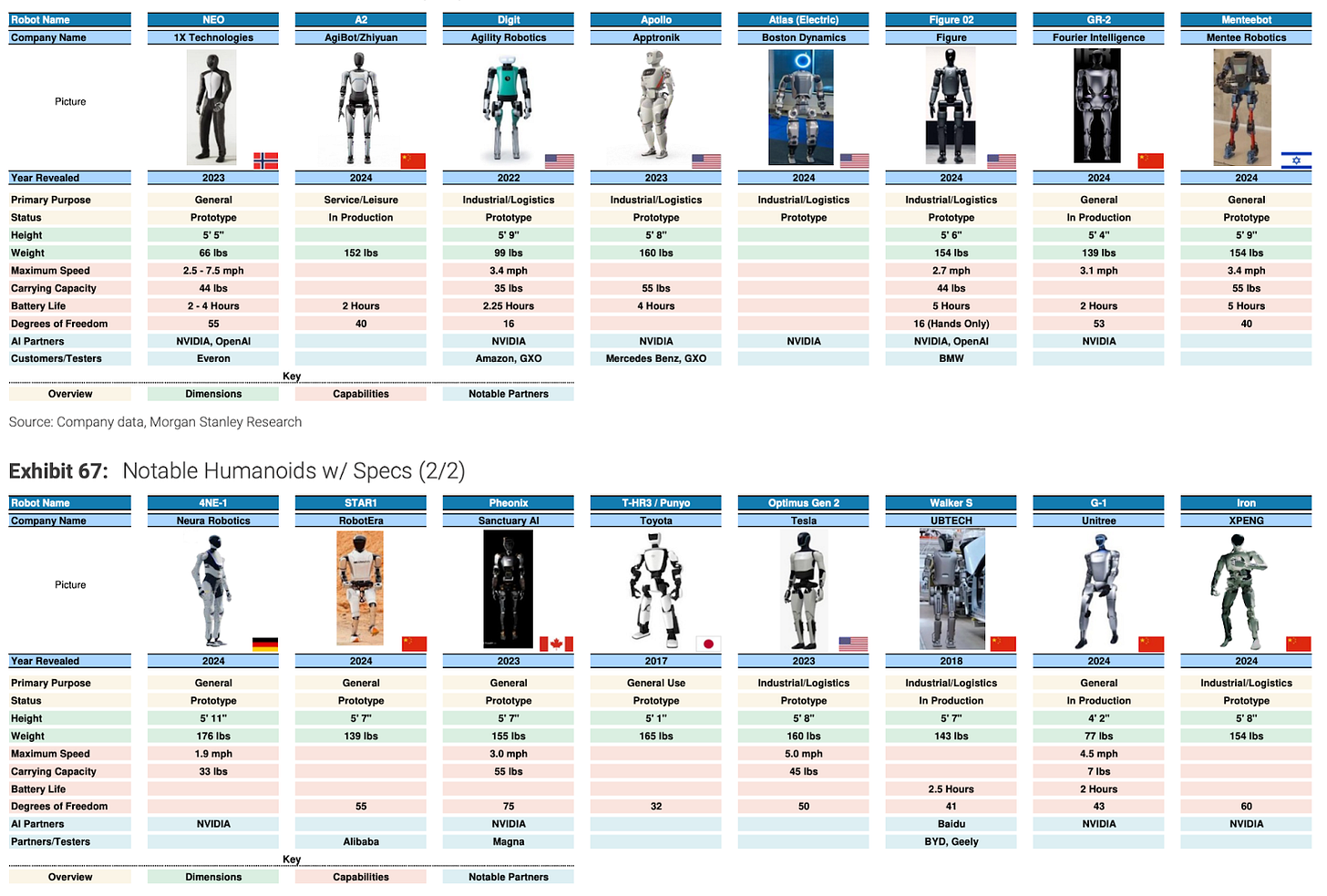
Источник: Morgan Stanley, The Humanoid 100: Mapping the Humanoid Robot Value Chain.
Прогресс в отрасли обеспечен развитием трех ключевых компонентов:
- Приводы: Функциональные «мышцы» робота — приводы преобразуют цифровые команды в точные движения. Новые технологии, такие как высокопроизводительные электромоторы для быстрых и точных перемещений, а также диэлектрические эластомерные приводы (DEA) для деликатных операций, значительно повысили уровень ловкости. Пример — Optimus Gen 2 от Tesla c 22 степенями свободы (DoF) и G1 от Unitree, оба показывают почти человеческую ловкость и впечатляющую мобильность.
Источник: Презентация новых гуманоидных роботов Unitree на боксерском шоу WAIC 2025
Сенсоры: Модернизированные сенсоры дают роботам возможность воспринимать и интерпретировать окружающий мир с помощью зрения, LIDAR/RADAR, тактильных и аудио каналов. Технологии обеспечивают безопасную навигацию, точное манипулирование и понимание ситуации.
Встроенные вычисления: Аппаратные CPU, GPU и AI-ускорители (TPU, NPU) способны обрабатывать сенсорные данные в реальном времени и запускать AI-модели для автономных решений. Надежная низкая задержка связи гарантирует синхронизацию, а гибридные edge–cloud архитектуры позволяют отдавать тяжелую обработку в облако и получать необходимый результат.
Слой интеллекта: «Мозг»
По мере совершенствования аппаратной части акцент смещается к построению «мозга робота» — фундаментальных моделей и продвинутых политик управления.
Прежде чем были внедрены AI-модели, роботы работали по жестко заданным алгоритмам и не обладали адаптивным интеллектом.
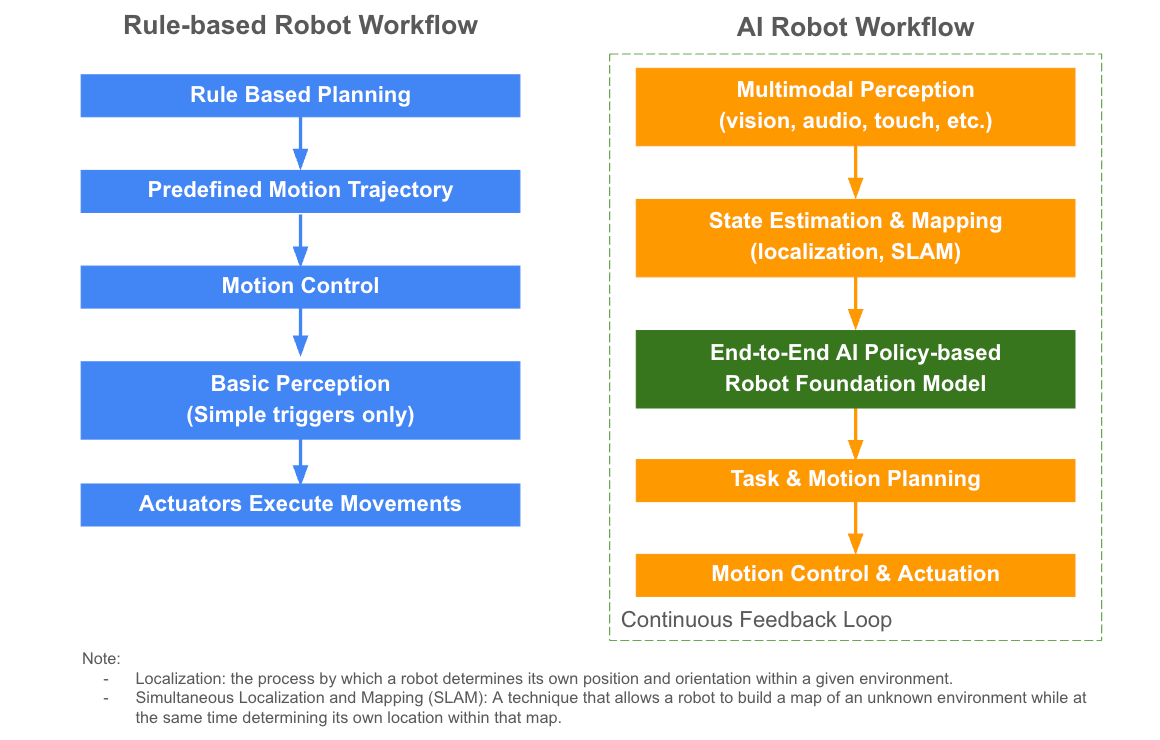
В современной робототехнике используются фундаментальные модели. Но универсальные языковые модели (LLM) не решают всех задач: роботы должны уметь адаптироваться, интерпретировать и действовать в меняющейся физической среде. Для этого отрасль разрабатывает сквозные, политико-ориентированные фундаментальные робототехнические модели, позволяющие роботам:
- Воспринимать: Получать и обрабатывать разнородные, необработанные мультимодальные сенсорные данные (зрение, звук, осязание)
- Планировать: Оценивать собственное состояние, строить карту среды, интерпретировать сложные инструкции, связывая восприятие напрямую с действием без ручного кодирования
Действовать: Генерировать планы движения и выдавать команды управления для выполнения в реальном времени
Такие модели осваивают общие политики взаимодействия с миром, давая роботам возможность выполнять широкий спектр задач, действуя интеллектуально и автономно. Более продвинутые модели используют постоянную обратную связь: за счет обучения на опыте роботы повышают собственную адаптивность в сложных условиях.
Ведущей архитектурой для фундаментальных моделей является Vision-Language-Action Model (VLA). Эти модели связывают сенсорные сигналы — прежде всего визуальные данные и инструкции на естественном языке — напрямую с действиями робота, позволяя ему реагировать на полученную информацию соответствующими управляющими командами. Примеры: Google RT-2, NVIDIA Isaac GR00T N1, π0 от Physical Intelligence (π).
Для повышения возможностей этих моделей часто интегрируются дополнительные подходы:
Модели мира: Строят внутренние симуляции физического окружения, чтобы обучить робота сложным действиям, прогнозировать результаты и планировать поведение. Пример — Genie 3 от Google, универсальная модель мира, создающая широкий спектр интерактивных сред.
- Глубокое обучение с подкреплением: Позволяет роботам осваивать поведение методом проб и ошибок.
- Телеоперация: Организует дистанционное управление и формирует обучающие данные.
Обучение по демонстрации (LfD), имитационное обучение: Передает роботам новые навыки через имитацию человеческих действий.
Ниже показано, как эти подходы развивают фундаментальные робототехнические модели.
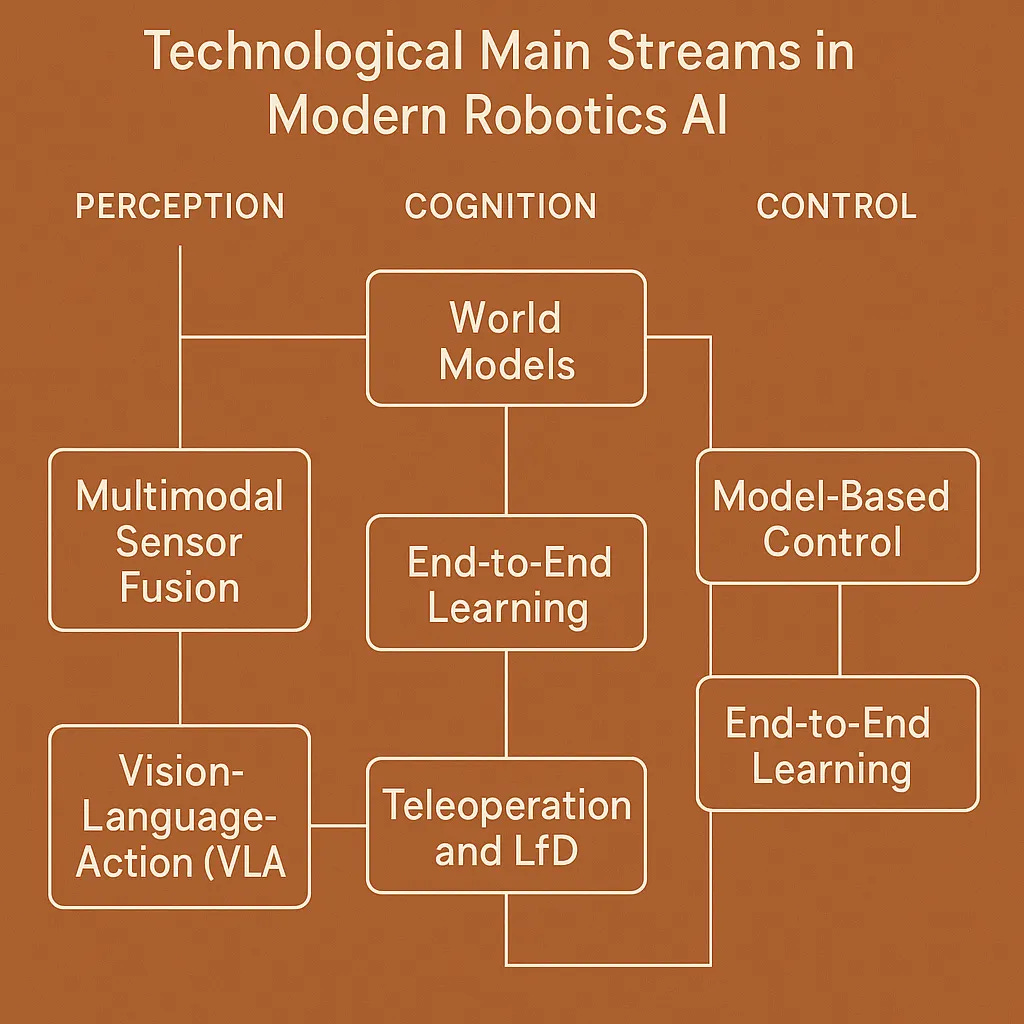
Источник: World models: the physical intelligence core driving us toward AGI
Последние успехи в open-source сегменте — например, π0 от Physical Intelligence (π), NVIDIA Isaac GR00T N1 — стали прорывом. Тем не менее, большинство фундаментальных робо-моделей централизованы и закрыты: такие компании, как Covariant, Tesla и другие предпочитают держать код и датасеты в секрете, поскольку открытость в текущих условиях мало мотивируется.
Отсутствие прозрачности мешает сотрудничеству и интеграции платформ — необходимы безопасные и прозрачные механизмы обмена моделями, стандарты на базе сообщества, слой кросс-совместимости. Это откроет путь для доверия, сотрудничества и динамичного развития.
Слой данных: «Знание» для мозга
Качественные датасеты для робототехники должны соответствовать трем требованиям: достаточному объему, высокому качеству и богатому разнообразию.
Несмотря на значительные усилия, индустрия испытывает нехватку масштабных датасетов. Для сравнения: GPT-3 от OpenAI обучалась на 300 млрд токенов, а крупнейший открытый робототехнический датасет Open X-Embodiment содержит чуть более 1 млн реальных траекторий для 22 типов роботов — это на порядки меньше необходимого для обобщения.
Закрытые методики — например, фабрика данных Tesla, где сотрудники снабжены костюмами захвата движения для накопления обучающих данных — помогают собирать реальные данные, но они дорогие, мало диверсифицированные и трудны для масштабирования.
Для решения этих задач отрасль использует три основных источника данных:
- Данные из интернета: Легко масштабируются, однако в основном относятся к наблюдению, не содержат сенсомоторных сигналов. Предобучение крупных vision-language моделей (GPT-4V, Gemini) на интернет-данных формирует полезные семантические и визуальные паттерны. Видео с кинематическими метками превращается в практический обучающий материал.
- Синтетические данные: Генерируются в симуляторах, быстро и массово, охватывают различные сценарии, но уступают по сложности реальным ситуациям (разрыв sim-to-real). Преодолению способствует доменная адаптация (аугментация, рандомизация, adversarial learning), а также sim-to-real трансфер — поэтапное дообучение на реальных данных.
Реальные данные: Редкие и дорогостоящие, но критичны для настройки моделей на реальные условия. Обычно включают эгоцентричные записи (вид от первого лица) и данные движений, фиксирующие реальные действия робота. Чаще всего собираются через человеческие демонстрации или телеоперацию с VR, системами захвата движения или тактильным обучением, что гарантирует обучение на точных примерах.
Исследования показывают, что объединение данных из интернета, реального мира и симуляторов существенно повышает эффективность обучения и надежность моделей, по сравнению с использованием только одного источника.
Причем увеличение объема данных важно, но разнообразие — еще важнее, особенно для переноса на новые задачи и роботов. Этого можно достичь с помощью открытых платформ и совместного обмена, включая создание мульти-платформенных датасетов для широкого спектра роботов и более сильных фундаментальных моделей.
Слой агента: «Физический AI-агент»
Переход к физическим AI-агентам — автономным роботам в реальном мире — ускоряется. Прорыв определяется тонкой настройкой моделей, непрерывным обучением и приспособлением к уникальному строению каждого робота.
Перспективы ускоренного развития физических AI-агентов открывают несколько направлений:
- Непрерывное обучение и адаптивная инфраструктура: Системы, в которых роботы совершенствуются через обратную связь и совместный опыт в процессе эксплуатации
- Экономика автономных агентов: Роботы выступают как экономические субъекты — обмениваются вычислениями и сенсорными данными на специализированных маркетплейсах и зарабатывают с помощью токенизированных сервисов
- Мультиагентные системы: Новые платформы и алгоритмы, позволяющие группам роботов координировать действия, сотрудничать и оптимизировать совместную работу
AI-робототехника и Web3: взлом масштабного рынка
Переход AI-робототехники в реальные условия сталкивается с рядом глубинных ограничений: централизованные склады данных и моделей, проблемы доверия, происхождения, конфиденциальности, комплаенса и слабой совместимости — все это тормозит развитие и мешает построению масштабируемой и жизнеспособной экосистемы.
Ключевые сложности AI-робототехники
Централизация данных и моделей
Робототехническим моделям нужны большие и разнообразные датасеты. Сейчас данные и модели сконцентрированы, фрагментированы и дороги, из-за чего системы становятся закрытыми и малоприспособленными. В реальных условиях роботы зачастую не справляются с задачами из-за нехватки разнообразия данных и слабой устойчивости моделей.
Доверие, происхождение и надежность
Недостаток прозрачных и поддающихся аудиту записей об источниках данных, обучении моделей и эксплуатации роботов препятствует принятию и ответственности — это серьезный барьер для пользователей, регуляторов и компаний.
Конфиденциальность, безопасность и соответствие требованиям
Чувствительные сферы — здравоохранение, домашняя робототехника — требуют строгой защиты личной информации и соответствия нормативам, например, GDPR в Европе. Централизованные платформы не способны обеспечить безопасное и приватное сотрудничество AI, что ограничивает обмен данными и тормозит инновации в чувствительных областях.
Масштабируемость и совместимость
Робототехнические системы сталкиваются с трудностями обмена ресурсами, совместного обучения и интеграции между различными платформами и конструкциями. Это мешает развитию сетевых эффектов и быстрому переносу функциональности между типами роботов.
AI Robotics и Web3: структурные решения и инвестиционные возможности
Web3-технологии принципиально решают указанные сложности, создавая децентрализованные, проверяемые, сохраняющие приватность и кооперативные сети роботов. Это открывает новые, перспективные рынки:
Демократизированная совместная разработка: Сети с мотивацией, в которых роботы обмениваются данными и коллективно создают модели и интеллектуальных агентов
- Проверяемое происхождение и ответственность: Blockchain обеспечит неизменяемую историю происхождения данных/моделей, идентичность робота и историю операций — основу доверия и соответствия требованиям.
- Конфиденциальное сотрудничество: Криптографические инструменты позволяют роботам совместно обучать модели и обмениваться результатами, не раскрывая приватные или защищенные данные
- Управление на базе сообщества: DAO — децентрализованные автономные организации — внедряют прозрачные, открытые on-chain правила и механизмы для мониторинга и регулирования деятельности роботов
- Кросс-платформенная совместимость: Открытые блокчейн-архитектуры обеспечивают бесшовное взаимодействие между разными робототехническими платформами, сокращая затраты и ускоряя перенос возможностей
- Экономика автономных агентов: Инфраструктура Web3 превращает роботов в самостоятельных экономических субъектов, позволяя им проводить p2p-транзакции, договариваться и участвовать в токенизированных маркетплейсах без человеческого вмешательства
Децентрализованные физические инфраструктурные сети (DePIN): Blockchain обеспечивает p2p-обмен вычислительными, сенсорными, хранилищными и сетевыми ресурсами, повышая масштабируемость и надежность роботов
Ниже приведены проекты, иллюстрирующие инновации и динамику развития сектора. Этот список исключительно ознакомительный и не является инвестиционной рекомендацией.
Децентрализованное развитие данных и моделей
Платформы на Web3 демократизируют процесс, стимулируя вклад участников — через костюмы для захвата движения, сенсорные данные, визуальные загрузки, разметку или синтетическую генерацию для симуляций и обучения. Это позволяет создавать разнообразные и представительные датасеты и модели, выходящие за пределы возможностей любой отдельной компании. Децентрализованные архитектуры также расширяют охват уникальных кейсов, что важно для роботов в нестандартных условиях.
Например:
Frodobots: Протокол для сбора реальных датасетов через роботизированные игры. Компания создала Earth Rovers — уличного робота и глобальную игру Drive to Earn. Благодаря этому был сформирован FrodoBots 2K Dataset: коллекция видеоматериалов, GPS, аудиоданных и данных управления человеком, собранных за ~2 000 часов телеуправляемых уличных роботов в более чем 10 городах мира.
- BitRobot: Совместный проект FrodoBots Lab и Protocol Labs — крипто-платформа на Solana с архитектурой субсетей. Каждая подсеть — отдельный челлендж, за вклад в модель или данные участники получают токены, стимулируя постоянное развитие.
- Reborn Network: Базовый слой для открытой экосистемы AGI-роботов. Решение Rebocap — костюм захвата движения, с помощью которого любой может записать и монетизировать свои движения. Это помогает формировать открытые датасеты для сложной гуманоидной робототехники.
PrismaX: Децентрализованная инфраструктура, гарантирующая разнообразие и достоверность данных благодаря глобальному сообществу. Механизмы мотивации и валидации позволяют масштабировать визуальные датасеты для робототехники.
Доказательство происхождения и надежности
Blockchain гарантирует прозрачность и контроль во всей экосистеме: подтверждает происхождение данных и моделей, идентифицирует роботов и фиксирует историю действий и вклад контрибьюторов. Репутационные on-chain системы, коллективная валидация и подтверждение с помощью stake защищают сектор от недоброкачественных или мошеннических данных и моделей.
Пример:
OpenLedger: Блокчейн-инфраструктура для AI — обучение и внедрение специализированных моделей на данных сообщества. Применяет Proof of Attribution для справедливого распределения наград между качественными контрибьюторами.
Токенизированное владение, лицензии и монетизация
Web3-native IP-инструменты дают возможность токенизировать лицензии на датасеты, возможности роботов, модели и интеллектуальных агентов. Вкладчики могут прописывать условия лицензии в смарт-контрактах, получая автоматические роялти при каждом использовании данных или моделей. Это обеспечивает открытый и справедливый рынок данных для робототехники.
Пример:
Poseidon: Децентрализованный слой данных, построенный на Story Protocol и инкубированным командой Story, обеспечивающий легально лицензированные обучающие датасеты для AI.
Решения для приватности
Ценные данные из больниц, гостиниц, домов сложно получить из открытых источников, но они дают богатую информацию для фундаментальных моделей. Криптографические технологии позволяют переводить приватные данные в on-chain активы — они становятся отслеживаемыми, компонуемыми и монетизируемыми с сохранением конфиденциальности. Trusted Execution Environments (TEEs) и Zero-Knowledge Proofs (ZKPs) обеспечивают защищенные вычисления и проверку результатов без раскрытия исходных данных. Такие инструменты позволяют организациям обучать AI на распределенных чувствительных датасетах, сохраняя приватность и соответствие требованиям.
Пример:
Phala Network: Позволяет запускать приложения в защищенных TEE для конфиденциальной AI- и обработке данных.
Открытое и ответственное управление
Обучение роботов зачастую проводится в закрытых системах без прозрачности и гибкости. Прозрачное, подтверждаемое управление критично для снижения рисков и укрепления доверия пользователей, регуляторов и бизнеса. Web3-технологии позволяют создавать on-chain мониторинг и совместную разработку открытого робототехнического интеллекта.
Пример:
Openmind: Открытая AI-native платформа для коллективного мышления, обучения и работы роботов. Недавно предложен ERC7777 — стандарт для создания безопасной, прозрачной и масштабируемой экосистемы роботов с правилами управления идентичностью, регистрации и правами участников.
Заключение
Будущее принадлежит синергии AI-робототехники и Web3: автономные системы выйдут на новый уровень масштабного взаимодействия и адаптивности. За счет быстрого совершенствования аппаратных платформ ближайшие 3–5 лет будут определяющими для появления гибких AI-моделей на базе реальных данных и децентрализованного управления. Мы ожидаем рост востребованности специализированных AI-агентов в гостиничном бизнесе, логистике и других сферах, что создаст новые отраслевые рынки.
Несмотря на оптимизм, интеграция AI-робототехники и криптотехнологий содержит сложные вызовы. Сбалансированные и эффективные механизмы мотивации еще только развиваются — системы должны честно вознаграждать вкладчиков, предотвращая злоупотребления. Техническая сложность требует надежных и масштабируемых решений для интеграции разнообразных конструкций. Решения для приватности должны быть абсолютно надежны: только так можно заслужить доверие при обработке личных данных. Кроме того, быстро меняющееся регулирование потребует аккуратного подхода к соблюдению норм в разных странах. Решая эти задачи и обеспечивая устойчивую отдачу, мы открываем путь к массовому внедрению инноваций.
Давайте активно следить за развитием и сотрудничать — совместная работа ускорит прогресс и позволит использовать все возможности нового, быстрорастущего рынка.
Инновации в робототехнике — путь, который эффективнее проходить вместе.
Отдельно благодарю Chain of Thought Robotics & The Age of Physical AI за ценные идеи для исследования.
Отказ от ответственности:
- Статья перепечатана с [merakiki.eth]. Все авторские права принадлежат оригинальному автору [@merakikieth">merakiki]. По вопросам републикации обращайтесь к команде Gate Learn — они оперативно рассмотрят обращение.
- Отказ от ответственности: Мнения и оценки, высказанные в статье, отражают точку зрения автора и не являются инвестиционной рекомендацией.
- Переводы статьи подготовлены командой Gate Learn. Если не указано обратное, копирование, распространение и плагиат переводов запрещены.